在目标跟踪中,不同数据集可能都有不同的评价指标,单目标跟踪(SOT)和多目标跟踪(MOT)的评价方式也有不同,这里主要介绍一下单目标跟踪的一些常见指标和概念。
也许以后会更新
Overlap Rate
- 定义:两个矩形框所包围面积的交集和并集的比值(即交并比)
- 范围:$[0, 1]$
- 实际上和目标检测里时常出现的IoU的定义是相同的,不过似乎在跟踪里更惯常叫这个名字
AOR(Average Overlap Rate)
- 定义:即Overlap Rate取帧平均
- 范围:$[0, 1]$
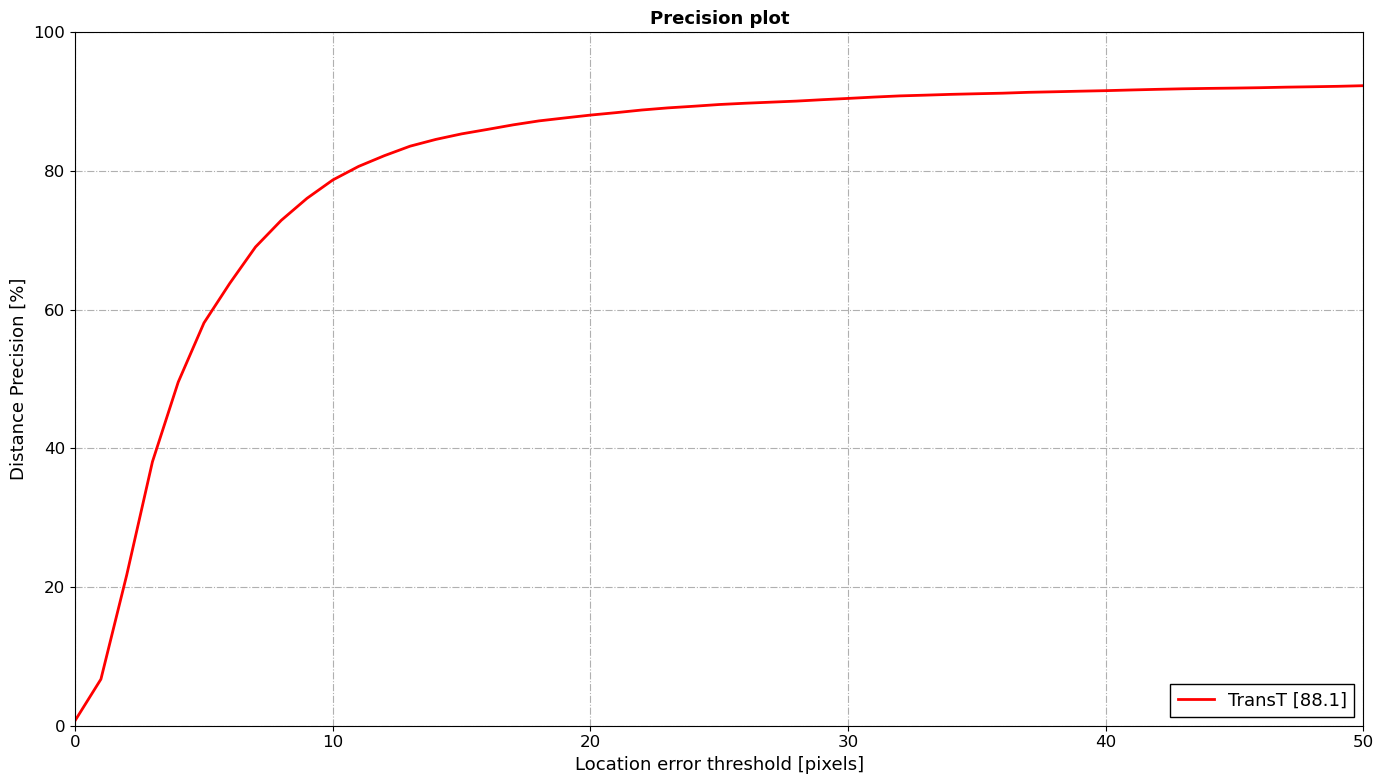
Precision
来自OTB2013
- 定义:预测框中心点和Ground Truth框中心点的欧氏距离,以像素为单位
- 缺点是没有考虑到目标的大小,小目标即使预测偏差较大,绝对的像素距离偏差也可能较小
Norm Precision
定义:预测框中心点到Ground Truth框中心点的欧氏距离,与Ground Truth框斜边的比值
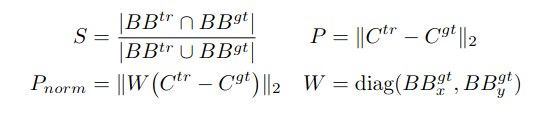
范围:$[0, 0.5]$
相较于Precision,好处是综合考虑了框的大小
Overlap Rate threshold
- 定义:人为设定的Overlap Rate的阈值,重叠率高于该阈值认为则是命中目标(Success)
- 范围:$[0, 1]$
Pixel Error threshold
- 定义:人为设定的Precision的阈值,像素误差小于该阈值则认为是命中目标(Success)
Success plot
定义:Success的帧数占总帧数的比例为成功率,成功率和Overlap Rate threshold / Pixel Error Threhold之间的关系曲线即为Success plot
例如:
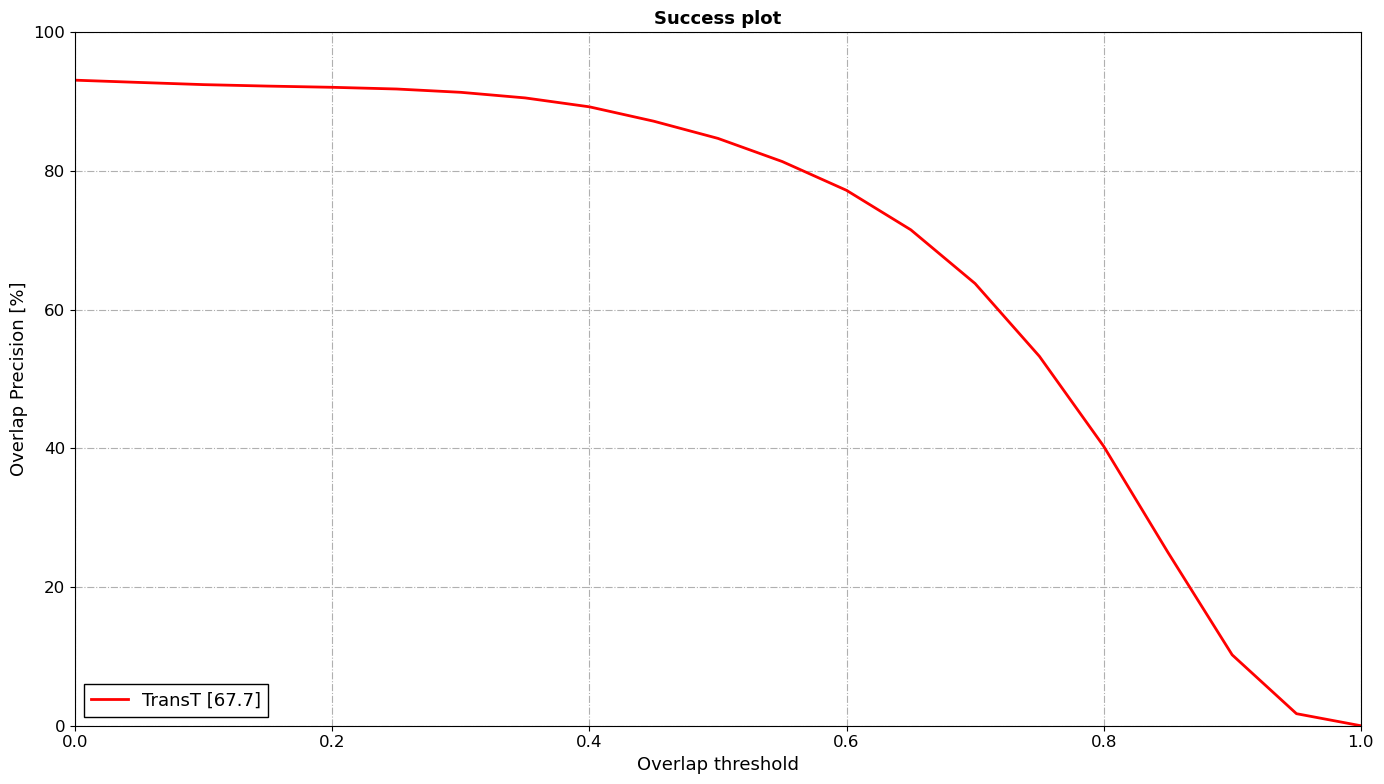
AUC(Area Under Curve)
- 定义:成功率图与坐标轴所包围的面积
- 范围:$[0, 1]$
- 一般用来衡量跟踪精度,好处在于相当于综合考虑了不同阈值下的情况